
Since 2014, a robotics competition designed to be nearly impossible has challenged and perplexed teams of students from around the globe.
So far, not a single team has managed to complete the objective, known as Mission 7 of the International Aerial Robotics Competition.
Nevertheless, students from Pitt’s Swanson School of Engineering and Dietrich School of Arts and Sciences are gearing up to attempt the mission a second time. The students have reason to be encouraged for the 2018 competition — they won Best System Design and scored the highest overall out of 13 international teams at the 2017 event, held at the Georgia Institute of Technology over the summer.
“We just want to continue our progress and complete the mission,” said Andrew Saba, director of outreach and team member of Pitt’s Robotics and Automation Society. “With the team we have, we can accomplish something really awesome.”
Mission 7 requires teams to design and build a drone capable of navigating through an indoor environment without landmarks while rounding up modified Roombas like sheepdogs.
The Pitt team’s robotic drone displayed autonomous flight — that is, the ability to guide itself as it flies — to various required waypoints in the arena, one of only four to successfully do so. But it could not herd the Roombas, leaving the mission incomplete. However, that hasn’t discouraged the team from making improvements and looking forward to next year’s competition.
“It was insanely successful,” said Levi Burner, an electrical engineering undergraduate who led the Pitt team at the competition. “We went in expecting very little. We expected to get the best T-shirt award. When we heard our name for Best System Design, we were shocked. We thought we were underdogs here.”
The drone used in this year’s competition, which weighs about 10 pounds and measures about 15 inches high and 3 feet across, will likely not be used for other competitions. The team is currently designing a new, more advanced drone that will be better equipped to beat the mission while also revising and expanding its software stack, a group of programs or applications that operate as a set.
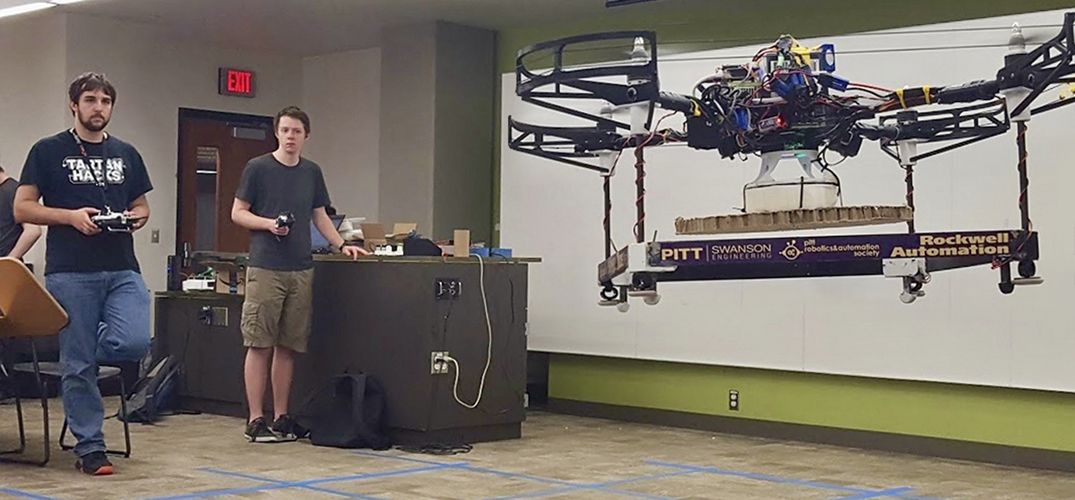
Levi Burner (left), an electrical engineering student in the Swanson School of Engineering, and Aaron Miller, a physics and computer science student, work with the drone their robotics team developed. The drone is scanning the floor using a camera to detect the lines in order to correct its orientation using an algorithm called canny edge detection. It's also performing an algorithm called optical floor on the floor itself — it uses the visual "noise" in the floor’s pattern to calculate how fast it's going and in which direction.
The Best System Design award the team won this year recognizes the overall design of the drone and its fitness for the mission, with points awarded for flight performance and several static judging categories including a symposium presentation and a technical paper.
“The judges felt our drone was best designed to be able to complete the mission,” said Saba.
“We’re just a bunch of undergrads. Some of the other people at the competition are master’s students doing their papers on some aspect of this competition.”
The International Aerial Robotics Competition Missions began in 1991, and each mission is repeated annually until it is successfully completed. Mission 6 was completed in 2013, prompting the creation of Mission 7 in 2014.
The missions are intentionally created to be impossible based on commercially available technology, therefore forcing the teams to invent their own technology to try to beat the challenge. In addition to the U.S. venue, an identical competition takes place annually at Beihang University in Beijing, China. American and Asian judges confer, and representatives from both regions are present at each venue. Because the mission was also not completed by a team at the Asia/Pacific venue this year, the mission will be repeated in 2018.
The Pitt team wants to recruit more members and enter more competitions in addition to honing the performance of its robotic drone for next year’s attempt at completing Mission 7.
“Doing as well as we did, it makes you very proud and confirms that you’re not crazy for trying this,” Saba said.
Robotics Team Meets Mission Impossible was originally published on the University of Pittsburgh website.